大港澳93040新版
服务热线:4008 292 822
联系人:丁先生
手机:188 1775 2361
传真:021-5995 1268
网址:
地址:上海市嘉定区汇仁路1800号
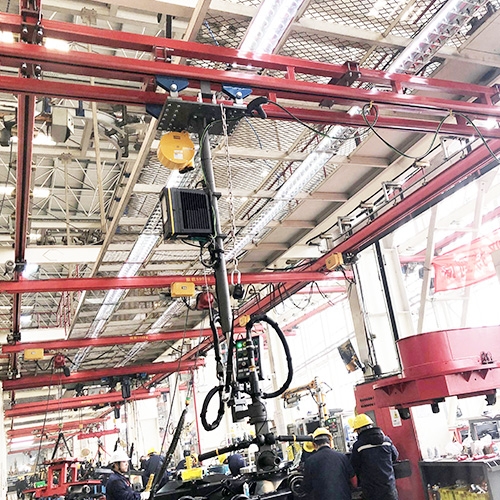
智能悬臂吊结构原理及操作方法
智能悬臂吊由五部分组成:
立柱是将智能悬臂吊的旋转臂支承固定,其上下支承由承受径向力及轴向力的单列圆锥滚子轴承构成
智能旋转臂智能旋转臂由工字钢与支撑组合焊接而成,其作用是电动或手动小车实现水平移动以及电动葫芦的上下升降动作,并绕立柱回转。
支撑臂与减速机支承臂对旋转臂起支撑作用,并增加旋转臂的抗弯性和强度。通过减速机带动滚轮,实现悬臂吊的电动回转。

环链电动葫芦环链电动葫芦起吊重物,沿旋转臂水平移动,其结构特点详见环链电动葫芦使用说明书。
智能电器部分智能电器部分采用C型轨加扁电缆供电系统,低压间控式安全电压进行操作,由手电门按纽实现控制,分别控制环链电动葫芦的快升、快降、慢升、慢降以及葫芦运行小车的行走和悬臂吊的左右回转,立柱内的集电环提供悬臂任意回转时的供电。